卡内基梅隆大学和英伟达合作开发了一种新的训练技术,使类人机器人能够以空前的灵活性执行复杂的运动动作——从克里斯蒂亚诺·罗纳尔多标志性的空中旋转庆祝动作到科比·布莱恩特的后仰跳投。
该框架,对齐模拟与真实物理(ASAP),通过允许类人机器人执行以前被认为过于复杂的高水平运动,弥合了模拟与现实之间的关键差距。
“类人机器人在执行类人全身技能方面具有无与伦比的多功能性潜力,”研究人员在他们的论文中指出。“然而,由于模拟与现实世界之间的动态不匹配,实现灵活和协调的全身运动仍然是一个重大挑战。”
ASAP通过两阶段过程来应对这一挑战。
首先,它在模拟中使用人类运动数据预训练运动跟踪策略——控制跟踪的算法规则。然后,它在现实世界中部署这些策略,以收集有助于弥合模拟与实际物理之间差距的数据。
最终结果是一个能够复制体育传奇的标志性动作s的类人机器人,包括克里斯蒂亚诺·罗纳尔多标志性的“Siu”庆祝动作(涉及180度的空中旋转)、勒布朗·詹姆斯的“消音器”庆祝动作(具有精确的单腿平衡)和科比·布莱恩特的后仰跳投(涉及单脚跳跃和着陆)。
除了这些华丽的运动动作,机器人还展示了其他令人印象深刻的壮举,如超过1米的前跳和侧跳。
乍一看,这些机器人可能仍然显得笨拙,但这主要是由于硬件限制,因为它们的关节活动性远不如人类。
然而,由于“增量动作模型”——一种补偿模拟与现实物理之间差异的修正机制,它们比其他机器人具有更高的灵活性。“增量动作模型有效地充当了动态差距的残差修正项。”
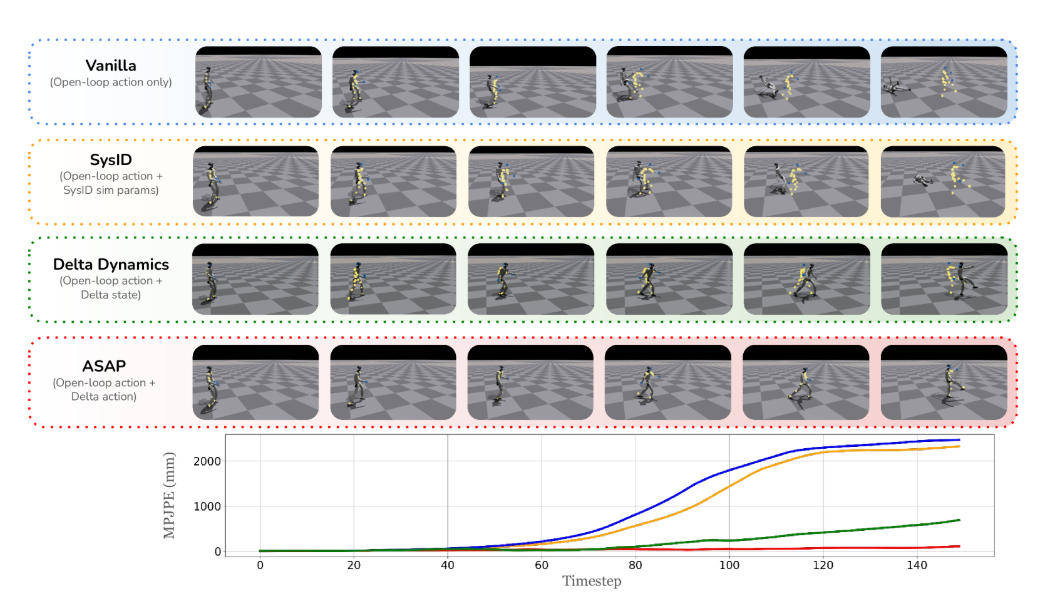
通过这种方法,研究人员将跟踪误差减少了多达52.7%,使机器人能够执行以前不可能的复杂动作。
“我们的方法显著提高了各种动态动作的灵活性和全身协调性,”研究人员指出,该系统的有效性“为类人机器人在现实世界应用中铺平了道路。”
开发具有这种灵活性的机器人特别困难,并且一直是机器人技术中最持久的挑战之一。
“几十年来,我们设想类人机器人能够达到甚至超越人类的灵活性。然而,大多数先前的工作主要集中在运动上,将腿视为移动的手段。”研究人员写道。
另一方面,ASAP在预训练中模仿人类身体,并能够在学习模拟后将其知识适应于现实世界场景。
通过这种方式,机器人的肢体像人类的肢体一样,能够用于运动、平衡、对重、表达等。
实现这一点比看起来要困难得多。当我们执行运动——甚至是基本动作时,实际上是在实时协调无数微妙的调整,平衡多种力量,同时补偿动量和位置的变化。
让机器人复制这一点被证明是极其困难的。
不相信我们?试试玩QWOP——这是一个你需要控制4个关节让运动员跑步的游戏。现在,当你花了几个小时掌握这个游戏时,想想同时管理ASAP处理的21个基本关节会有多困难——再考虑一下人类身体有超过300个不同的关节。
类人机器人领域在近年来一直活跃,许多公司和大学在研发上投入了更多资源。
特斯拉的Optimus项目、Figure AI最近的类人机器人公告以及波士顿动力的Atlas都突显了对类人机器人日益增长的商业兴趣。
在学术领域,布里斯托大学和斯坦福大学也开发了自己的方法来教模型如何更灵活并提高它们的灵活性。
该团队专注于进一步开发ASAP。
“未来的方向可以集中在开发损伤感知政策架构,以减轻硬件风险,”他们表示,指的是一些模型在尝试执行复杂动作时出现故障的情况。
他们还希望研究“利用无标记姿态估计或机载传感器融合来减少对动作捕捉系统的依赖”,并改善他们的适应技术以实现更高的效率。我们距离拥有一个全机器人世界杯还有多久?
编辑:Sebastian Sinclair和Josh Quittner
免责声明:本文章仅代表作者个人观点,不代表本平台的立场和观点。本文章仅供信息分享,不构成对任何人的任何投资建议。用户与作者之间的任何争议,与本平台无关。如网页中刊载的文章或图片涉及侵权,请提供相关的权利证明和身份证明发送邮件到support@aicoin.com,本平台相关工作人员将会进行核查。







